
更新时间:2025/04/11 English Version (英文)
悟瞳:遥感大模型理论研究与应用框架
2024.04-至今
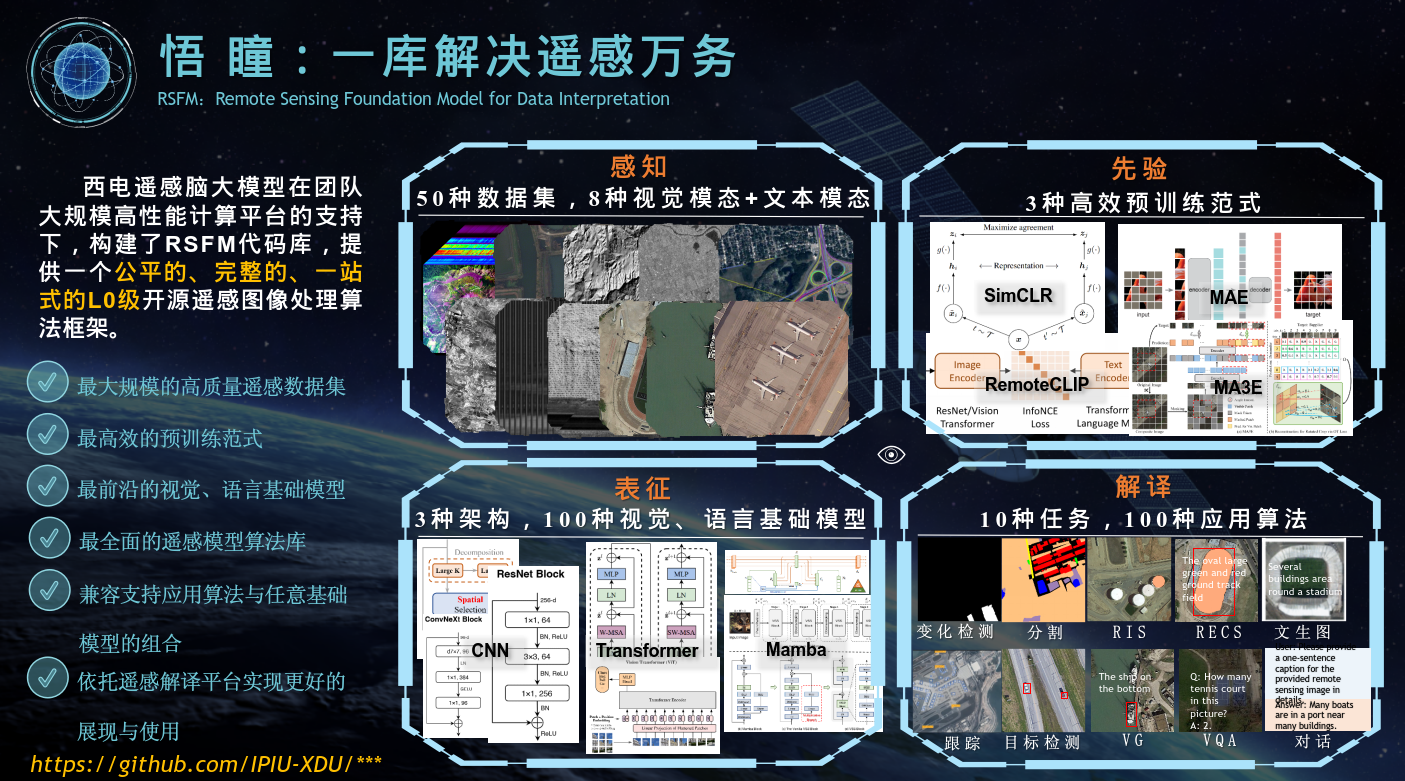
针对遥感领域中感知、生成与解译缺乏规范化基准以及闭源等现状,本课题组设计了高效、鲁棒的理论算法,构建了多种模态评估数据集及标准化分区,并建立了统一的代码框架 RSFM,开发了集视觉、语言与多模态于一体的基础模型,取得了 “一库解决万务” 的应用成果。
- 该框架涵盖了 CNN、Transformer、Mamba 等架构共计 100 + 种视觉、语言基础模型理论算法,参数量从最小 3M 到最大 3B 不等,适配不同应用场景需求。
- 统一了分类、检测、分割、跟踪、多模态理解、多任务学习、视觉问答、生成等 10 + 种任务共计 100 + 种应用算法,兼容支持与任意基础模型的组合。
- 建立了来自顶刊、顶会、国际竞赛等 50 + 种公开数据集及规范化分区,包含多光谱、SAR、文本等 8 + 种多模态数据,涉及水文、植被、交通等 10 + 种多样化场景。
我的职责
- 分割任务:基于 SegMunich、SPARCS 和 7 个数据集的 SpectralGPT 预训练实验,Potsdam 系列基础实验。
- 变化检测:LEVIR-CD+ 实验。
- 参考图像分割:在 RefSegRS 上进行 ConvNext、FocalNet、InternImage 实验。
- 多光谱通道选择与仓库优化
- 相关专利撰写
- 持续研究:阅读该领域文献,方法入库与效果测试。
智能眼控轮椅
2023.07-2023.11

这是一款专为患有渐冻症(ALS)等手脚活动困难的患者设计的智能轮椅。该轮椅通过采集患者眼球的运动信息,实现对轮椅行进方向的控制,解决了行动受限人群“出行难”的问题。同时,轮椅搭载激光雷达,实时感知周围环境,结合差分定位算法,实现室内自动驾驶功能。
主要功能:
- 眼动控制行驶:通过采集用户眼球运动信息,实现对轮椅前进、转向等操作的控制。
- 室内自主导航:利用激光雷达获取环境数据,结合定位算法,实现室内路径规划与自动驾驶。
- 语音与音乐互动:为无法开口说话的用户提供眼动语音控制功能,可发送如“我想吃饭”“我想喝水”等定制语音内容;同时支持通过眼动选择音乐,实现陪伴与娱乐功能。
我的职责:
- 用户手册编写:负责编写详细的用户操作说明文档,帮助患者及家属快速上手并正确使用各项功能。
- 眼动控制算法优化:对眼动识别与控制算法进行改进,提升系统响应速度与准确性,增强使用体验。
- 硬件调试:完成微控制器的接入与调试,确保硬件与软件之间的数据交互稳定可靠。